Calibration Tool
Multi-Sensor Calibration Tool
When using the Lidar-camera fusion dataset, if you want to map the point cloud data to the image data more accurately, the accuracy requirements for the camera parameters will increase accordingly. At this point, you can manually adjust the parameters of the data to generate a more accurate camera parameter for the data through a visual method.
-
Enter a
Lidar Fusiondataset, and select Camera with gear icon on the top.
At here, you can create a new parameter or select previous settings.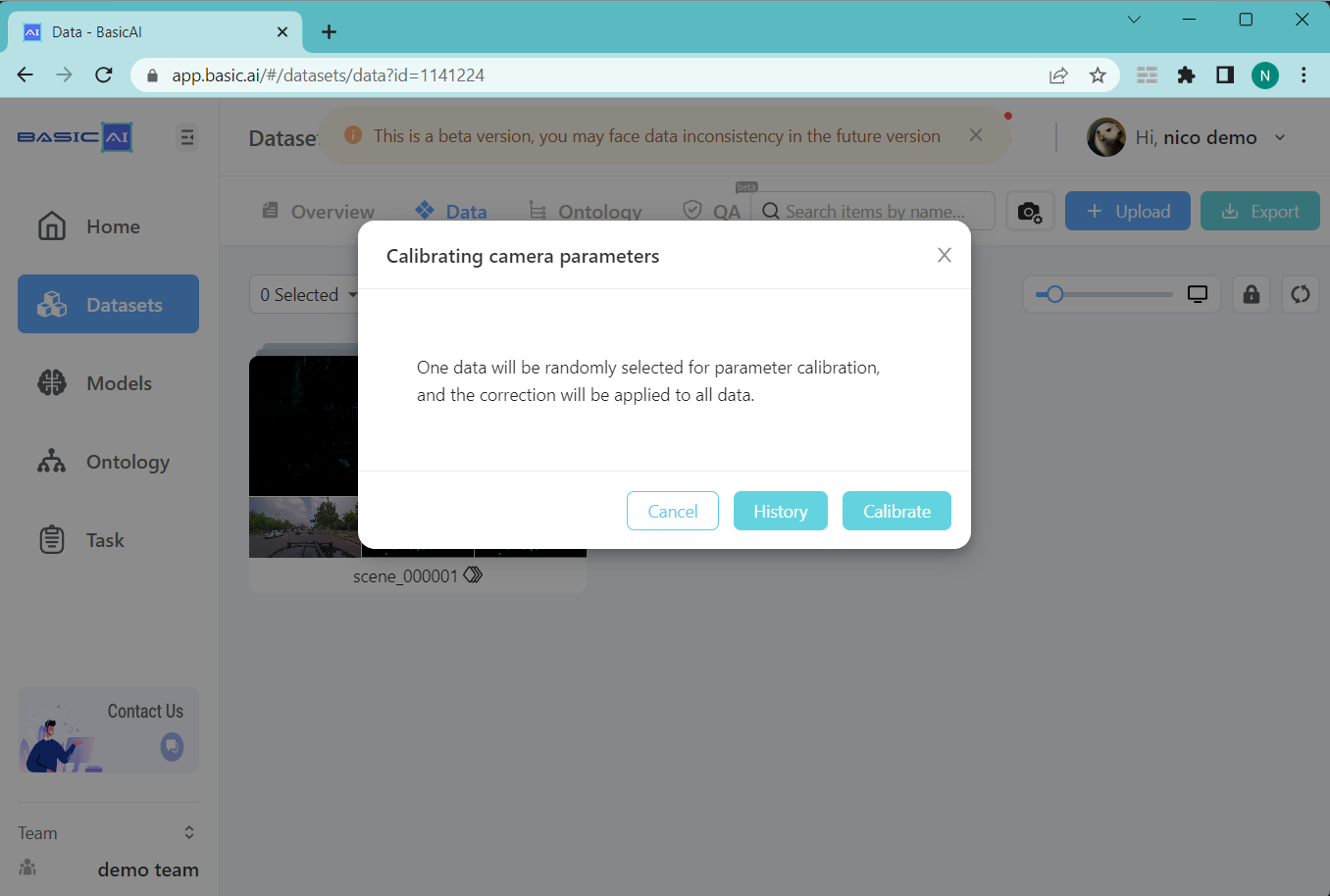
-
Select a point in the point cloud and modify its corresponding projection inthe camera image. Each image should have at least three points that are associated with the point cloud result.
- After adjusting the positions of the points, click
Retry Calibration. After the calibration is complete, create a new point or project points to check if the automatically mapped point positions are correct. If they are not correct,you will need to readjust the positions of each pair of points in the camera images and point cloud again.
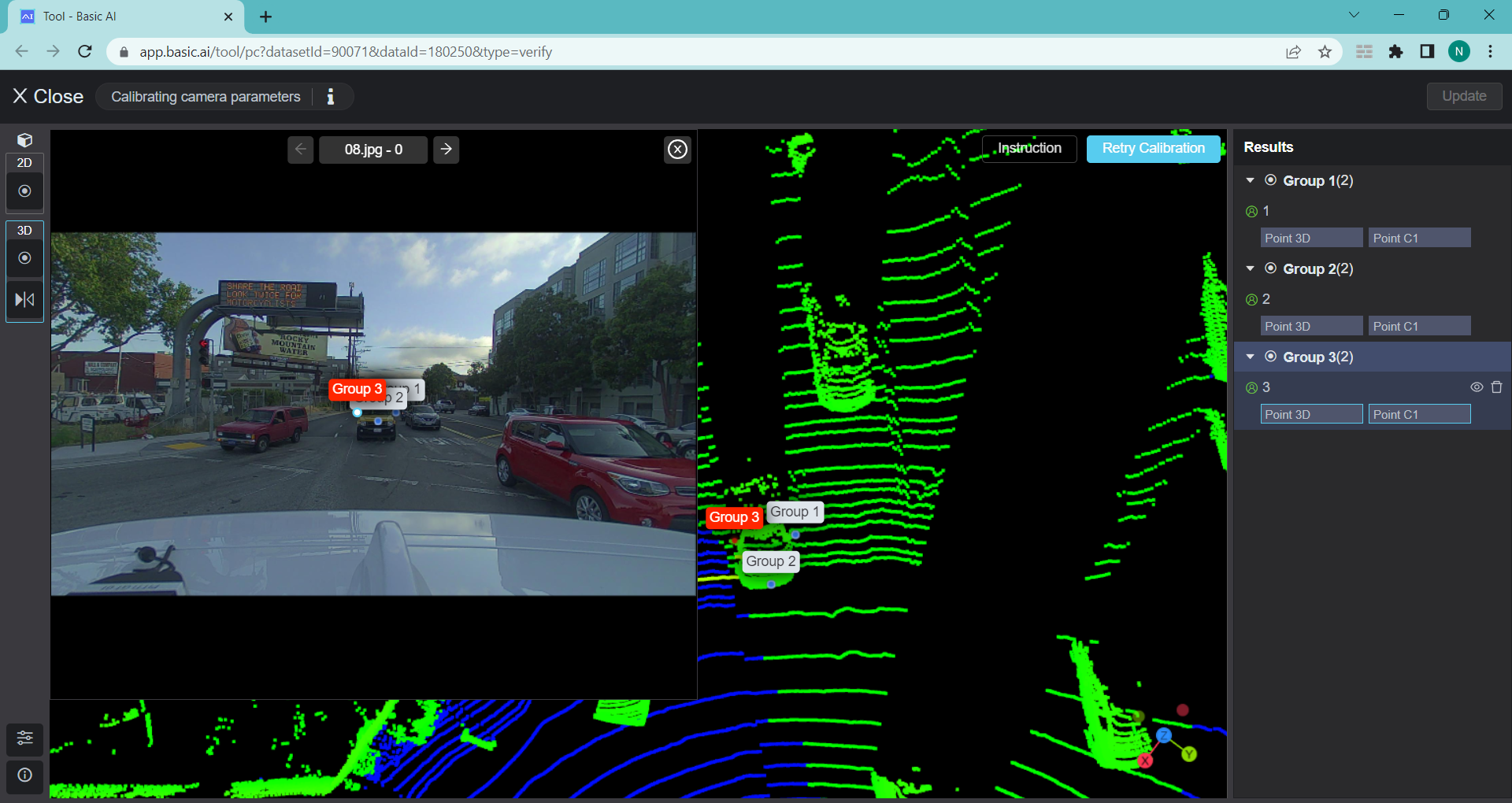
- If it is correct, apply the current camera parameters.
Updated about 2 months ago